前回はArduinoでMyoWareを使ってみました('ω')ノ
今回はサーボを動かすのと、ラズパイへデータを送ってみたいと思います('ω')ノ
ラズパイへの接続方法はi2cです
サーボのコードはこちらを参照ください
Arduinoでのコードはこんな感じ('ω')ノ
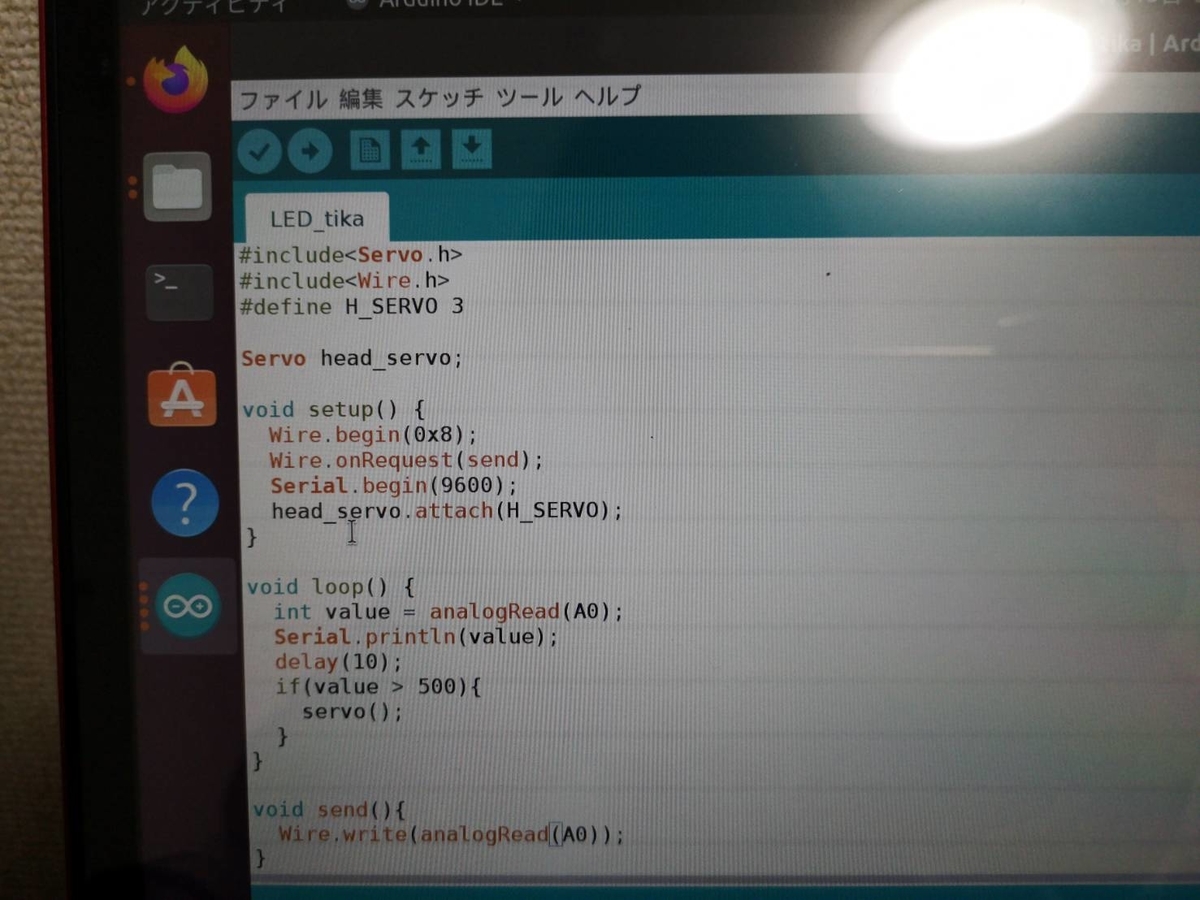
Wire.onRequest(send) でラズパイから要求されたときに送る関数を指定します。ここでは、send()関数としています
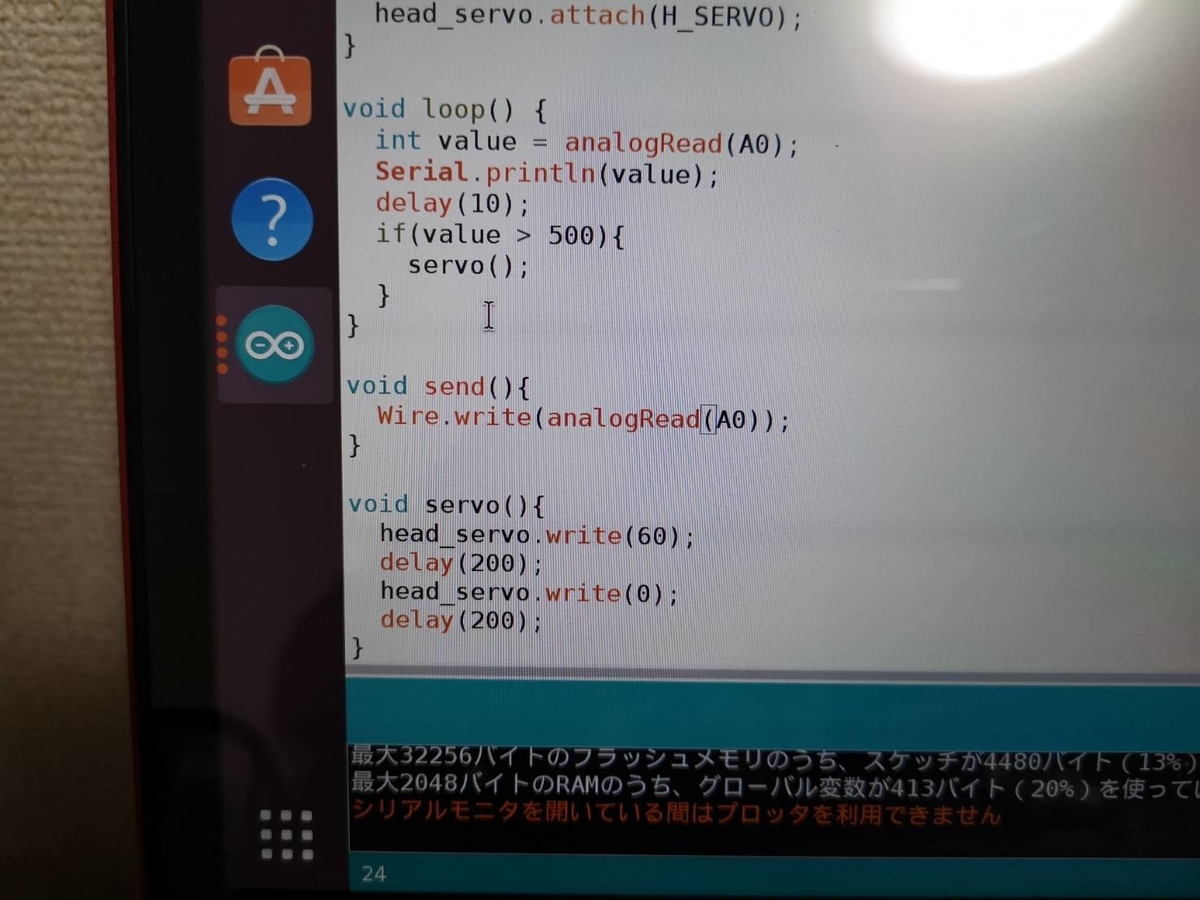
send()関数は Wire.write(analog.Read(A0)) でマスターへ1バイトをキューに送ります
値が500以上の時サーボが動くようにしています
こんな感じ('ω')ノ
ラズパイのコードです
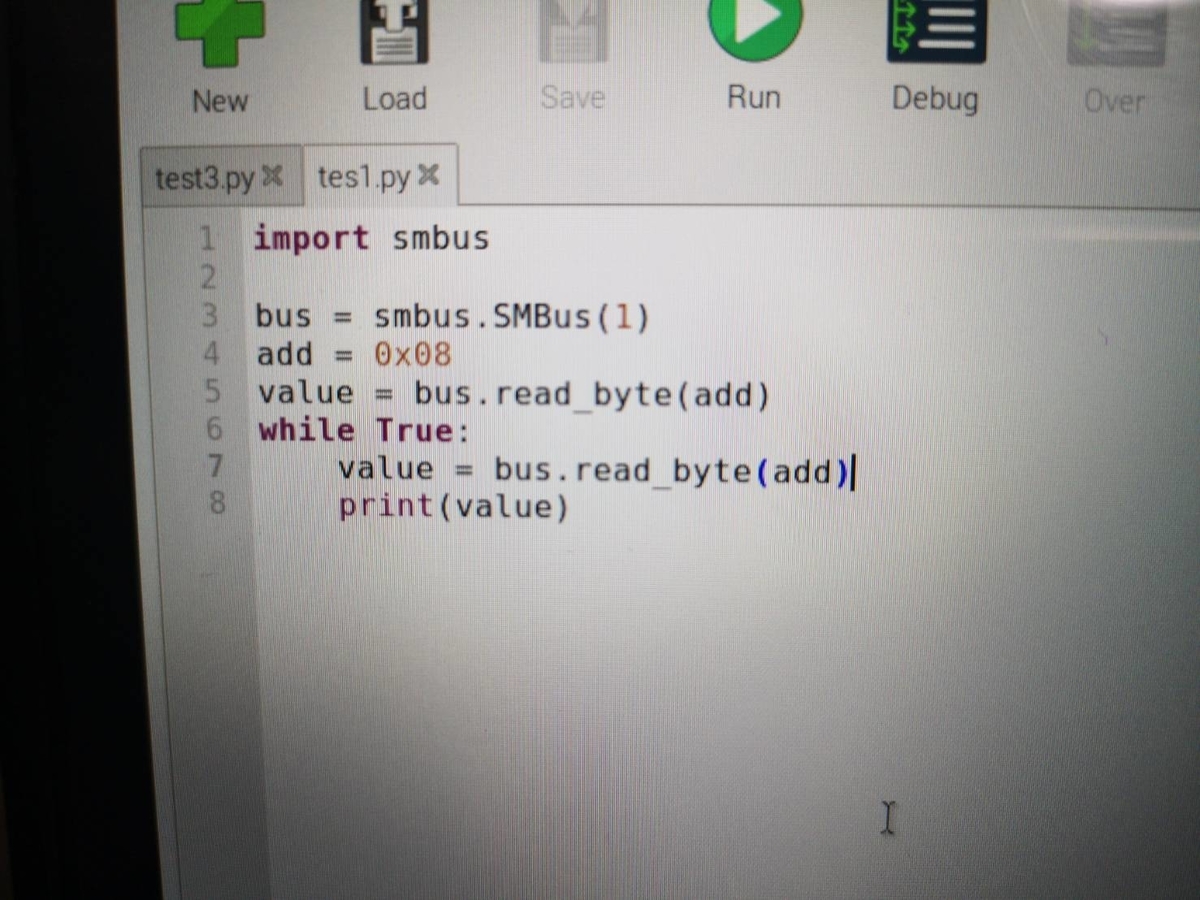
while True で値を読み込ませて無限ループさせています
Ctrl+Cで止められます('ω')ノ
とりあえず今日はこんな感じ('ω')ノ